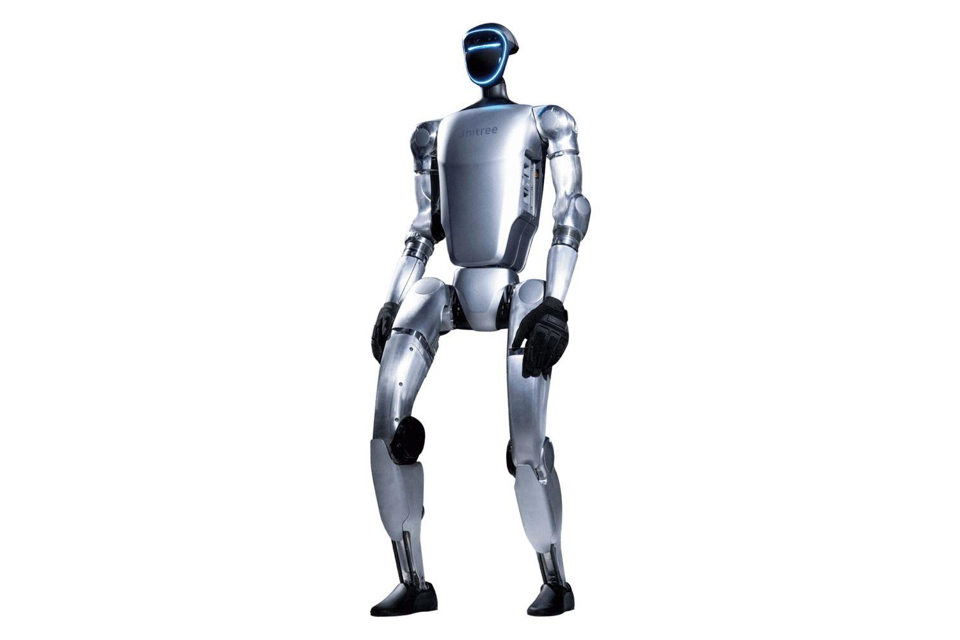
Программно-аппаратный комплекс робот Unitree G1 версия EDU Standart


| Характеристика | Значение |
|---|---|
| Тип робота | Гуманоидный |
| Назначение | Программно-аппаратный комплекс для разработок |
| Процессоры | 8-ядерный. Опционально — NVIDIA Jetson Orin |
| Тип движителя | Опоры |
| Количество движителей | 2 |
| Дополнительная поддержка | Не требуется |
| Варианты передвижения | Вперед, назад, вбок, повороты |
| Максимальная скорость | 2 м/сек |
| Количество степеней свободы | 23.0 |
| Особенности степеней свободы | Степени свободы: "ноги" — 6 (каждая), "руки" — 5 (каждая), "торс" — 1. Опционально — увеличение до 43 |
| 3D камеры | Камера глубины |
| Лазерные дальномеры | 3D Lidar |
| Беспроводные интерфейсы | WiFi 6, Bluetooth 5.2 |
| Управление | ручное (контроллер) |
| Установленное оборудование | 3D Lidar Livox-MID360, камера глубины Intel RealSense D435 |
| Установка доп.оборудования | Возможность установки трехпалых манипуляторов |
| Требование к нагрузке | Макс.нагрузка на руку — 2кг |
| Материал корпуса | Алюминий |
| Электропитание | 54VDC/5A |
| Емкость аккумулятора | 9000 |
| Время работы на одном заряде, мин | 120 минут |
| Цвет | Серебристый |
| Ширина, мм | 450.0 мм |
| Высота, мм | 1270.0 мм |
| Глубина, мм | 200.0 мм |
| Вес, кг | 37.0 кг |
| Особенности | Макс.крутящий момент в коленном суставе — 120N.m. Движение суставов: пояс — ±155град., колено — 0~165град., тазобедр.сустав. — P±154град., R-30~+170град., Y±158град.. Длина ноги — 0,6м, руки — 0,45м. Отсутствие внешних кабелей. |
| Вид поставки | RTL |
| Ссылка на описание | https://www.unitree.com/g1/ |
| Комплект поставки | Робот, комплект документации, зарядное устройство, аккумулятор |